Датчики положения ifm


Инженерное назначение
Датчики положения в промышленной автоматизации используются для подтверждения безопасного состояния механизмов и корректной последовательности операций в машинах и роботизированных ячейках. С инженерной точки зрения это не только “факт наличия объекта”, но и контроль разрешающих условий: закрыта ли защитная зона, достигнут ли упор, находится ли привод в конечном положении, выполнено ли требование по предотвращению неконтролируемого пуска. В типовых системах безопасности машин датчики положения участвуют в цепочках блокировки и контроля: сигнал “дверь закрыта/клапан закрыт/цилиндр в исходном” используется для разрешения запуска, снятия энергии с опасного движения, контроля останова и предотвращения повторного старта при обслуживании. При проектировании учитывают способ обнаружения (индуктивный/оптический/ультразвуковой/магнитный/емкостной), устойчивость к загрязнениям и среде, требования к диагностике, а также риски ложных срабатываний и пропусков.
Линейка продукции
- Индуктивные датчики
- Фотоэлектрические датчики
- Емкостные датчики
- Магнитные датчики
- Ультразвуковые датчики
- Датчики положения клапана
- Датчики положения цилиндра
Области применения
- Сборочные линии, конвейерные системы, подающие механизмы
- Роботизированные рабочие зоны и автоматизированные станочные комплексы
- Пневмо- и гидроприводы (контроль конечных положений)
- Запорная арматура и исполнительные механизмы (обратная связь “открыто/закрыто/позиция”)
- Упаковочные машины, сортировка, транспортировка, паллетирование
- Участки с загрязнением/влажностью/мойкой (подбор по исполнению и степени защиты)
Индуктивные датчики

Индуктивные датчики положения применяются для надежного контроля металлических целей в узлах машин: подтверждение закрытия ограждения, достижения механического упора, наличия заготовки в зоне обработки, фиксации каретки/стола/зажима. В задачах безопасности важна предсказуемость переключения и устойчивость к загрязнению (стружка, СОЖ, масло), поскольку ложное “разрешение” может привести к неконтролируемому пуску или включению опасного движения при открытой зоне обслуживания. В типовых схемах датчик участвует как источник дискретного сигнала для ПЛК/модуля безопасности: “условие выполнено” разрешает запуск цикла, а “условие нарушено” переводит систему в безопасное состояние (останов/снятие энергии с исполнительного механизма). При подборе учитывают материал и размер цели, монтаж (утопленный/неутопленный), допустимые зазоры, помехи от соседних металлоконструкций и повторяемость срабатывания, чтобы исключить дребезг и пропуски при вибрации.
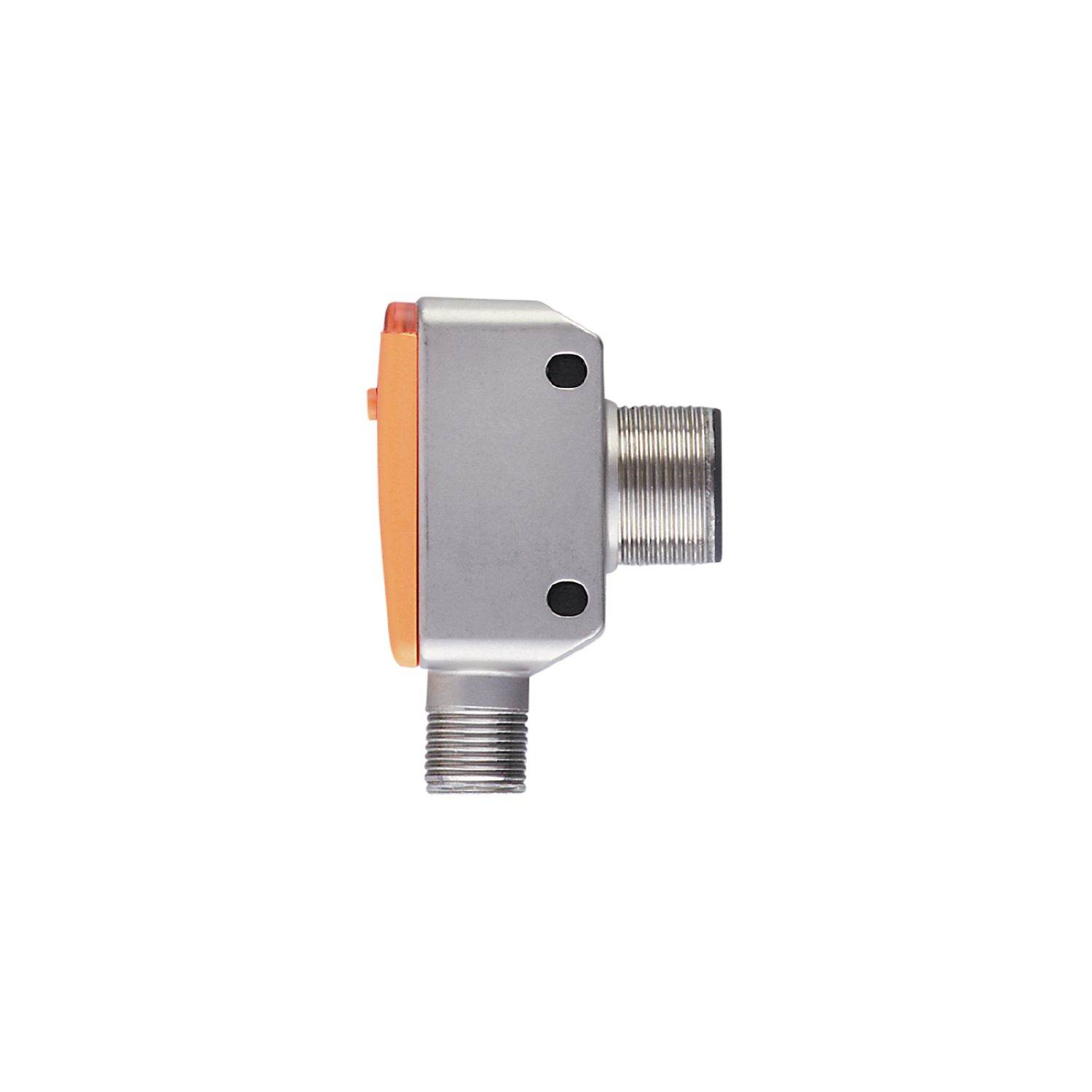
Фотоэлектрические датчики

Фотоэлектрические датчики положения используются там, где требуется бесконтактное обнаружение объектов независимо от металличности: контроль присутствия тары, изделий, этикетки, детали на конвейере, а также контроль расстояния/смещения. Для задач безопасной эксплуатации важно корректно отрабатывать сценарии “объект отсутствует” и “объект в зоне”, чтобы машина не запускалась при незагруженной оснастке или при нахождении объекта в запретной зоне движения. В автоматизированных рабочих зонах оптика часто работает как часть логики предотвращения опасного движения: подтверждает удаление предметов из зоны закрытия, контролирует крайние положения шиберов/кареток по мишени, обеспечивает межоперационные блокировки. При проектировании учитывают фон, отражающую способность и загрязнение линз, чтобы избежать ложных разрешений; дополнительно оценивают необходимость подавления заднего фона и стабилизации показаний при вибрации, пыли или водяном тумане.
Емкостные датчики


Емкостные датчики положения применяются для обнаружения материалов и сред, которые плохо “видны” индуктивным датчикам: пластики, стекло, бумага, гранулят, порошки, жидкости через стенку емкости. В инженерной логике безопасности и устойчивого цикла они часто закрывают риск некорректного запуска: подтверждают наличие/уровень продукта, наличие заготовки в кассете, заполнение дозатора, положение/наличие упаковки перед операцией термосварки или реза. Ошибка датчика в таких узлах может привести к “пустому” ходу машины, заклиниванию, повреждению оснастки и к опасным ситуациям при вмешательстве персонала. Поэтому при подборе оценивают влияние влажности, налипания, толщины стенки и диэлектрических свойств материала, а также стабильность настроек чувствительности, чтобы исключить ложное разрешение на запуск и обеспечить предсказуемую блокировку процесса при отсутствии объекта/среды.
Магнитные датчики



Магнитные датчики положения применяются для контроля перемещений и конечных положений, когда на объекте есть магнит или магнитная метка, либо когда конструктивно удобнее работать “через стенку” корпуса/кожуха. С точки зрения безопасной эксплуатации это позволяет реализовать подтверждение положения без механического контакта и износа, что снижает риск отказа в критической цепочке “разрешение/запрет движения”. В типовых машинах магнитные датчики используются для контроля положения заслонок, лючков, сменных кассет, а также для фиксации подвижных элементов, где важно исключить ложные срабатывания из-за вибраций и наводок. При проектировании учитывают ориентацию магнита, влияние внешних полей и расстояние, чтобы исключить ситуацию, когда система ошибочно подтверждает безопасное состояние и допускает запуск при фактическом незавершенном перемещении или при открытой зоне обслуживания.
Ультразвуковые датчики

Ультразвуковые датчики положения применяются для обнаружения объектов по расстоянию независимо от цвета и прозрачности в ряде практических случаев, где оптика нестабильна (блики, полупрозрачная пленка, неоднородная поверхность). В контуре безопасной работы машины ультразвук используют для подтверждения наличия объекта в зоне захвата, контроля заполнения и контроля положения деталей/тары перед выполнением опасной операции (рез, прессование, перемещение манипулятора). Инженерный риск здесь — ложное разрешение при некорректном “эхе” или ложная блокировка при турбулентности и шуме; поэтому при подборе анализируют геометрию зоны, отражающие поверхности, расстояния до фоновых объектов и условия среды. В результате датчик становится частью межоперационных блокировок, снижающих вероятность неконтролируемого запуска при неготовности технологического узла.
Датчики положения клапана


Датчики положения клапана обеспечивают обратную связь “открыто/закрыто/промежуточное положение” на исполнительных механизмах запорной арматуры и поворотных приводах. В системах безопасной эксплуатации это критически важно для предотвращения опасных режимов: запуск насоса при закрытой линии, подача среды в неразрешенную ветвь, включение технологической операции без подтверждения закрытия/отсечки. По сути датчик становится элементом межблокировок, исключающих неконтролируемый пуск и неправильную последовательность переключений. При проектировании учитывают тип привода (четвертьоборотный/линейный), способ монтажа по стандарту, устойчивость к вибрациям и загрязнениям, а также требования к диагностике и читаемости состояния для оперативного персонала. Правильно организованная обратная связь снижает риск аварийного выброса, гидроударов и опасных вмешательств при обслуживании.
Датчики положения цилиндра



Датчики положения цилиндра применяются для контроля конечных положений пневмо- и гидроцилиндров в станках, захватах, пресc-узлах и транспортных механизмах. В контексте безопасности машин они обеспечивают подтверждение, что подвижный орган действительно ушёл в безопасное положение (исходное/отведённое), прежде чем разрешить доступ в зону обслуживания или выполнить следующий шаг цикла. Это напрямую снижает риск неконтролируемого пуска и защемления при подвижных механизмах: система не выдаёт “разрешение” до получения достоверного сигнала “цилиндр отведён/зажим разжат/упор достигнут”. Для инженерной надежности важны корректное размещение относительно магнита поршня, устойчивость к вибрации и натяжению кабеля, а также повторяемость срабатывания, чтобы исключить дребезг и рассогласование в быстрых циклах. В автоматизированных рабочих зонах такие датчики часто входят в межблокировки, обеспечивающие безопасную последовательность движения и предотвращающие опасные повторные старты.
Часто задаваемые вопросы
1) Как выбрать тип датчика положения под среду с маслом, СОЖ и стружкой?
Ответ: В загрязнённой зоне сначала оценивают риск ложного “разрешения” из-за налипания и экранирования. Для металла и стружки чаще выбирают индуктивный датчик с корректным монтажом и запасом по расстоянию срабатывания, а оптику применяют только при возможности защитить линзу и стабилизировать фон. Для неметаллических объектов рассматривают ультразвук или емкостной принцип, но обязательно проверяют влияние пленок, влажности и налипания на порог. Итоговый выбор делают по устойчивости сигнала в худших условиях, потому что нестабильность напрямую влияет на безопасность и на предотвращение неконтролируемого пуска.
2) Чем опасны ложные срабатывания датчика положения в контуре безопасности?
Ответ: Ложное срабатывание опасно тем, что система получает “условие выполнено” при фактически невыполненном состоянии: дверь не закрыта, цилиндр не отведён, клапан не в нужном положении. Это может привести к запуску движения в открытой зоне обслуживания или к включению технологической операции при неправильной конфигурации узла. Поэтому в цепочках безопасности оценивают не только тип датчика, но и монтаж, допуски, диагностику, а также сценарии отказа: важно, чтобы при неопределённости сигнал переводил систему в безопасное состояние, а не давал разрешение.
3) Когда фотоэлектрический датчик лучше, чем индуктивный, для контроля положения?
Ответ: Оптика выигрывает, когда объект неметаллический или требуется контроль по поверхности/краю/наличию этикетки, а также когда нужно измерение расстояния и смещения. Однако при выборе учитывают загрязнение линзы, блики и фон: в нестабильных условиях оптика может давать ложные переходы, что критично для блокировок безопасности. Поэтому фотоэлектрический принцип применяют там, где можно обеспечить повторяемую оптическую картину и где отказ не приведёт к опасному разрешению движения, либо где предусмотрена дополнительная проверка состояния.
4) Как подобрать датчик положения цилиндра, чтобы исключить “залипание” сигнала при вибрации?
Ответ: Сначала оценивают конструкцию цилиндра (тип паза, наличие магнита поршня, место установки) и возможные смещения датчика от вибрации и натяжения кабеля. Затем выбирают крепление и способ фиксации, обеспечивающие стабильное положение чувствительной зоны, и проверяют повторяемость срабатывания на скорости цикла. Для безопасной логики важно, чтобы при срыве крепления или потере ориентации датчик не давал устойчивого “разрешение”; поэтому дополнительно рассматривают контроль времени движения и диагностические признаки рассогласования.
5) Можно ли использовать емкостной датчик для контроля через стенку пластиковой ёмкости?
Ответ: Технически да, но инженерно нужно учитывать толщину стенки, её диэлектрические свойства и наличие конденсата/налипания. Эти факторы меняют ёмкостную картину и могут смещать порог, что приводит к ложному “уровень есть” или “уровня нет”. В критичных блокировках это недопустимо, поэтому проводят испытание на реальной ёмкости, задают запас по чувствительности и предусматривают сценарий отказа, при котором система уходит в безопасное состояние при неопределённости сигнала.
6) Как учитывать материал цели для индуктивного датчика положения?
Ответ: Разные металлы по-разному влияют на поле датчика, поэтому реальное расстояние срабатывания зависит от материала цели и её геометрии. Для инженерной надежности принимают минимально гарантированный вариант: тонкая цель, неблагоприятный материал, загрязнение и зазор. Это особенно важно, когда сигнал участвует в разрешении запуска: недоучёт материала может привести к срабатыванию “на грани” и к нестабильному разрешению, что опасно для предотвращения неконтролируемого пуска и для безопасной последовательности операций.






 Ответ от производителя может занять до 5 дней и более.
Ответ от производителя может занять до 5 дней и более.