Модули контроля Siemens
- EPos basic positioner
- Модуль контроля CU310 DP
- CompactFlash card for CU310-2
- Модуль контроля CU320
- CompactFlash card for CU320-2

Обзор
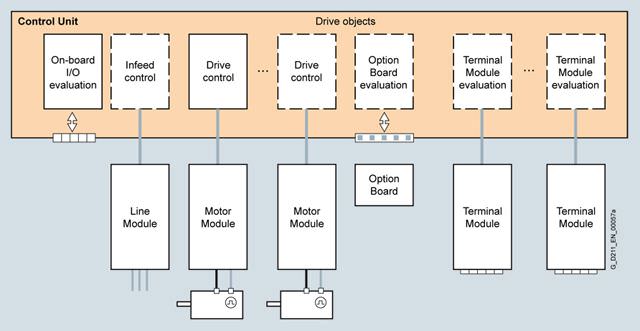
Новая архитектура системы с центральным блоком управления
Электронно скоординированные отдельные приводы работают для выполнения задач. связанных с приводами. Контроллеры более высокого уровня управляют приводами для достижения необходимого уровня скоординированных движений. Для этого необходим цикличный обмен данными между контроллером и приводами. Обычно передача данных происходит с помощью шины, что требует значительного времени и усилий для установки и настройки. SINAMICS S120 использует другой подход: центральный блок управления контролирует все приводы на наличие подключенных осей, а также устанавливает технологические связи между приводами и/или осями. Поскольку все необходимые данные хранятся в центральном блоке управления, нет необходимости в их передаче. Внутриосные соединения могут быть установлены в блоке управления и легко настроены в средстве STARTER с помощью мыши.
Простые технологические задачи могут быть легко выполнены автоматически блоком управления SINAMICS S120
Блоки управления CU310 DP или CU310 PN доступны для одиночных приводов
Блок управления CU320 разработан для многоосных приложений
Сложные задачи по контролю движения могут быть реализованы с поддержкой более мощного блока управления D425, D435 и D445 SIMOTION D (оцененного в соответствии с производительностью)
Каждый из этих блоков управления основан на объектно-ориентированной микропрограмме стандарта SINAMICS S120, содержащей все наиболее популярные режимы контроля и может быть масштабирован для соответствия наиболее строгим требованиям к производительности.
Элементы контроля привода поставляются полностью настроенными объектами:
* для "контроля питания";
* для более широкого диапазона жестких асинхронных (индуцированных) приложений двигателя "Векторное управление" и V/f -управления;
* для асинхронных двигателей статического поля с жесткими динамическими требованиями "Управление Servo“.
Наиболее часто используемые V/f режимы контроля хранятся в объекте привода "Векторное управление" и оптимально подходят для реализации простых приложений, таких как группы приводов с двигателями SIEMOSYN.
Приводные объекты
Приводные объекты — это самодостаточные программные функции с собственными параметрами и при необходимости собственные сообщениями об ошибках и аварийными сигналами
Полный набор функций контроля по обратной/прямой связи модуля
Большое количество стандартных функций, таких как ввод контрольных точек, замена набора данных, оптимизация контролера, кинетическая буферизация и т.д. гарантируют высокую степень надежности рабочего процесса и высокую гибкость приложения.
Обзор ключевых функций контроля по обратной/прямой связи модуля:
Типы контроля с закрытым циклом S120 | Типы контроля с открытым циклом S120 | Основные функции S120 для блокового формата/формата шасси | Комментарии, примечания | |
|---|---|---|---|---|
Контроль питания |
|
|
| Сетевой датчик — это модуль распознавания напряжения VSM 10; "активным" является сетевой ток; 3-фазный с линейной частотой |
Векторное управление |
|
|
| Выполнение смешанных операций с V/f-режимами контроля возможно, именно для этого V/f-режимы контроля хранятся только на объекте привода "Векторное управление"
|
Servo control |
|
|
| Mixed operation with V/f control modes is possible; it is for this reason that the V/f control modes are stored only once in the "Vector Control" drive object Position control can be selected as a function module from both Servo and Vector mode. |
Пакеты технических услуг
Блоки управления SIMOTION D поддерживают координированный контроль движения нескольких приводов. В дополнение к объектам приводов эти блоки управления также поддерживают технологические объекты, такие как "кулачковый контроллер", "синхронизм", "эксцентрик" и "контроль температуры", при этом эти объекты группируются для формирования пакетов технических услуг. Пользователи могут создавать собственные объекты и создавать связи между всеми настроенными объектами.
Технология BICO
Каждый объект привода содержит большое количество входных и выходных переменных, которые могут быть свободно и независимо подключены с помощью технологии BICO. Это логический сигнал, который может иметь значение 0 или 1, Соединитель — это цифровое значение, т.е. фактическая скорость или активная контрольная точка.
Функциональные модули
"Базовый позиционер" используется для абсолютного/относительного позиционирования линейных и вращающихся осей (коэффициент) с шифроваторами двигателя (система косвенных показателей) или машинные шифраторы (система прямых показателей). "Технологический контроллер" разработан как PID-контроллер. Он подходит для реализации элементов управления для контролирующих переменных. таких как уровень заполнения, температура, напряжение, давление, величина расхода и положение.
Интегрированные функции защиты
Блоки управления поддерживают функции безопасности, такие как "Безопасное отключение“ (STO = Защитный механизм отключения привода)
Карта CompactFlash
Функции приводов SINAMICS S120 хранятся на карте CompactFlash. На этой карте хранятся микропрограмма и настройки параметров для всех приводов в форме проекта. На карте CompactFlash также могут храниться дополнительные проекты, что означает, что доступ к текущему проекту может быть получен немедленно при вводе в эксплуатацию определенного количества устройств различных типов. При загрузке блока управления данные на карте CompactFlash считываются и загружаются в ОЗУ.
Микропрограмма разделена на объекты. Объекты привода используются для реализации функций контроля по обратной/прямой связи для линейных модулей, модулей двигателя, модулей питания и других компонентов системы, подключенных к DRIVE-CLiQ.
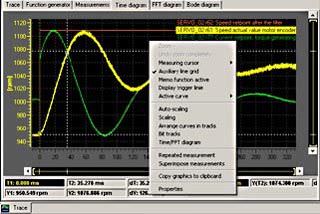
Диагностика оптимально поддерживается функцией отслеживания
Временные характеристики входных и выходных переменных, связанных с объектами приводов, могут быть измерены с помощью интегрированной функции отслеживания, и отображены с помощью средства STARTER. Отслеживать можно до 4 сигналов одновременно. Запись может быть инициирована в качестве функции свободно выбираемых граничных условий, например, значение входной или выходной переменной.




 Ответ от производителя может занять до 5 дней и более.
Ответ от производителя может занять до 5 дней и более.