mz robolab GmbH - rcs1 robot control Siemens
Обзор
Professional automation solutions with the rcs1 robot control
- Retrofitting of proven, reliable hardware (robots and machines) with the latest control technology
- New robots with the user-friendly, extremely flexible rcs1 control
- Sensory automation solutions for complex, innovative applications
Hardware concept
As an open, universal PC-based robot control, the rcs1 control is based on the latest, proven Siemens standards.
Sensor motor technology
The rcs1 is designed to allow the versatile integration of sensortechnology. A part from extensions for optical sensors, e.g. for real-time seam tracing, in particular stable processes for a hard contact force control robolab sensing system (rss1) are available as an extension, which simplify numerous robotic applications, or even make them possible for the first time.
Controllable axes
In its standard configuration, the rcs1 is designed as a 6-axis control, but it can be expanded considerably, e.g. up to a 16-axis control with coordinated control of additional axes and belt synchronization.
Kinematics
The rcs1 control is not limited to classic manipulator kinematics: Kinematics can be custom defined, e.g. for Cartesian robots, gantry robots, swivel/rotating tables.
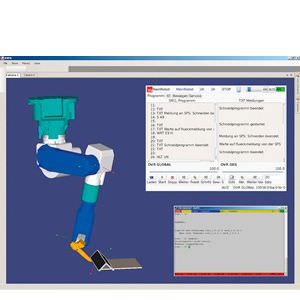
Programming
Various user interfaces are available as options for programming the robot system:
- Hand-held unit (HHU) with touch screen
- Graphic user interface
- 3D simulation and programming system
- Programming interface in C/C++ Programming languages
- Manual programming with a 6D force sensor
- SRCL program interpreter
- C/C++ program library
Дальнейшая информация
Please contact:
mz robolab GmbH
Marie-Curie-Straße 1
53359 RHEINBACH
GERMANY
Tel.: +49 2226 83600-00
E-mail: kontakt@robolab.de
Internet: http://www.robolab.de




 Ответ от производителя может занять до 5 дней и более.
Ответ от производителя может занять до 5 дней и более.