Управляющие модули Siemens

Обзор
Управляющие модули CU230P-2

Управляющий модуль CU230P-2 HVAC
Управление преобразователем осуществляется через управляющий модуль.
The CU230P-2 Control Units are designed for drives with integrated technological functions for pump, fan and compressor applications.
Интерфейс I/O, интерфейсы полевой шины и дополнительные программные функции обеспечивают оптимальную поддержку таких приложений. Интеграция технологических функций является важным отличительным признаком этих управляющих модулей линейки приводов SINAMICS G120.
Управляющие модули CU230P-2 могут работать со следующими силовыми модулями:
- PM230
- PM240
- PM250
- PM260
Типичные, интегрированные HVAC/HLK-функции
- линейные и квадратные кривые моментов для гидравлических машин и объемных насосов
- ECO-режим для дополнительной экономии энергии
- 2 аналоговых входа (ток/напряжение по выбору) для прямого подключения датчиков давления/уровня
- 2 дополнительных аналоговых входа для подключения датчиков температуры NI1000/PT1000
- прямое управление вентилями и заслонками через двумя реле 230 В
- автоматический перезапуск после отключения питания
- перезапуск на ходу
- пропускаемые частоты
- экономия энергии через гибернацию („спящий режим“)
- контроль нагрузки (для ремённой передачи), контроль потока
- каскадирование двигателей
- 4 встроенных ПИД-регулятора (для температуры, давления, качества воздуха, уровня)
- многозонный регулятор
- расширенный аварийный режим
- часы реального времени с тремя таймерами
IOP-помощники для специальных приложений, к примеру
- насосы: плунжерные (постоянный момент нагрузки) и центробежные (квадратичный момент нагрузки) с и без ПИД-регулятора
- вентиляторы: радиальные и осевые вентиляторы (квадратичный момент нагрузки) с и без ПИД-регулятора
- компрессоры: объемные насосы (постоянный момент нагрузки) и гидравлические машины (квадратичный момент нагрузки) с и без ПИД-регулятора
Управляющие модули CU240B-2 и CU240E-2

Управляющий модуль CU240E-2 DP-F
Управление преобразователем осуществляется через управляющий модуль.
Управляющие модули CU240B-2 и CU240E-2 являются стандартными управляющими модулями для всех распространенных приложений с U/f- или векторным управлением.
- серия CU240B-2 с базовым набором I/O, оптимален для большинства приложений
- серия CU240E-2 со стандартным набором I/O и встроенной техникой безопасности
Управляющие модули CU240B-2 и CU240E-2 могут работать со следующими силовыми модулями: - PM240
- PM250
- PM260
Функции Safety Integrated
В базовых вариантах серии CU240E-2 (CU240E-2 и CU240E-2 DP) функция безопасности "Безопасно
отключенный момент" (STO, Safe Torque Off) уже интегрирована (сертификация согласно EN 954-1, категория 3 и IEC 61508 SIL 2, а также ISO 13849-1 PLd).Следующие, расширенные функции Safety Integrated интегрированы в управляющие модули CU240E-2 F и CU240E-2 DP-F:
- безопасно отключенный момент (STO, Safe Torque Off) для защиты от активного движения привода
- безопасный останов 1 (SS1, Safe Stop 1) для непрерывного контроля безопасной рампы торможения
- безопасно ограниченная скорость (SLS, Safely Limited Speed) для защиты от опасных движений при превышении предельной скорости (управляющий модуль CU240E-2 DP-F имеет до 4 выбираемых предельных значений SLS)
- безопасное направление вращения (SDI) функция обеспечивает возможность вращения привода только в выбранном направлении.
- безопасный контроль скорости (SSM) функция SSM подает сигнал, если привод работает при частоте вращения/скорости подачи ниже специфицированных (только CU240E-2 DP-F с PROFIsafe).
Все интегрированные Safety-функции обходятся без датчика двигателя или энкодера; это сокращает затраты. Особенно это касается уже существующих установок, которые могут быть оснащены техникой безопасности без внесения изменений в двигатель или механику. Функция STO может использоваться без ограничений для всех приложений. Функции SS1, SLS, SDI и SSM допускаются только для задач, в которых ускорение груза после отключения преобразователя частоты невозможно. Тем самым они не разрешены для нагрузок с натяжением, к примеру, подъемников и размоточных устройств.
Дополнительную информацию см. главу "Отличительные осбенности", раздел Safety Integrated.
Дизайн
Управляющие модули CU230P-2 HVAC, CU230P-2 DP и CU230P-2 CAN

Клемма № | Сигнал | Особенности |
|---|---|---|
Цифровые входы (DI) – стандарт | ||
69 | DI Com | Опорный потенциал цифровых входов |
5 ... 8, | DI0 … DI5 | Свободно программируемые |
Цифровые выходы (DO) | ||
18 | DO0, NC | Релейный выход 1 |
19 | DO0, NO | Релейный выход 1 |
20 | DO0, COM | Релейный выход 1 |
21 | DO1, NO | Релейный выход 2 |
22 | DO1, COM | Релейный выход 2 |
23 | DO2, NC | Релейный выход 3 |
24 | DO2, NO | Релейный выход 3 |
25 | DO2, COM | Релейный выход 3 |
Аналоговые входы (AI) | ||
3 | AI0+ | Дифф. вход, возможность |
4 | AI0- | |
10 | AI1+ | Дифф. вход, возможность |
11 | AI1- | |
50 | AI2+/Ni1000 | Потенциально связанный вход, |
51 | GND | Опорный потенциал AI2/внутренняя |
52 | AI3+/Ni1000 | Потенциально связанный вход для |
53 | GND | Опорный потенциал AI3/внутренняя |
Аналоговые выходы (AO) | ||
12 | AO0+ | Потенциально связанный выход |
13 | AO0- | Опорный потенциал AO0/внутренняя масса электроники |
26 | AO1+ | Потенциально связанный выход |
27 | AO1- | Опорный потенциал AO1/внутренняя |
Интерфейс датчика температуры двигателя | ||
14 | T1 motor | Положительный вход для датчика |
15 | T2 motor | Отрицательный вход для датчика |
Питание | ||
9 | +24 V OUT | Выход питания |
28 | GND | Опорный потенциал |
1 | +10 V OUT | Выход питания |
2 | GND | Опорный потенциал |
31 | +24 V IN | Вход питания |
32 | GND IN | Опорный потенциал входа питания |
35 | +10 V OUT | Выход питания |
36 | GND | Опорный потенциал |
Управляющие модули CU240B-2, CU240B-2 DP

Управляющий модуль CU240B-2 с закрытыми и открытыми крышками клеммников
Клемма № | Сигнал | Особенности |
|---|---|---|
Цифровые входы (DI) | ||
5 … 8 | DI0 … DI3 | Свободно программируемые |
69 | DI COM | Опорный потенциал для цифровых |
Цифровой выход (DO) | ||
18 | DO0, NC | Релейный выход DO0 |
19 | DO0, NO | Релейный выход DO0 |
20 | DO0, COM | Релейный выход DO0 |
Аналоговый вход (AI) | ||
3 | AI0+ | Дифф. вход, возможность |
4 | AI0- | |
Аналоговый выход (AO) | ||
12 | AO0+ | Потенциально связанный выход |
13 | AO0- | Опорный потенциал AO0/внутренняя |
Интерфейс датчика температуры двигателя | ||
14 | T1 motor | Положительный вход для датчика |
15 | T2 motor | Отрицательный вход для датчика |
Питание | ||
9 | +24 V OUT | Выход питания |
28 | GND | Опорный потенциал |
1 | +10 V OUT | Выход питания |
2 | GND | Опорный потенциал |
31 | +24 V IN | Вход питания |
32 | GND IN | Опорный потенциал входа питания |
Управляющие модули CU240E-2, CU240E-2 DP, CU240E-2-F и CU240E-2 DP-F
Управляющий модуль CU240E-2 с закрытыми и открытыми крышками клеммников
Клемма № | Сигнал | Особенности |
|---|---|---|
Цифровые входы (DI) – стандарт | ||
5 … 8, | DI0 … DI5 | Свободно программируемые |
69 | DI COM1 | Опорный потенциал цифровых |
34 | DI COM2 | Опорный потенциал цифровых |
Цифровые входы (DI) – повышенной безопасности | ||
16, 17 | F-DI0 | Цифровые входы повышенной |
Следующие только у CU240E-2 F и CU240E-2 DP-F | ||
5, 6 | F-DI1 | Цифровые входы повышенной |
7, 8 | F-DI2 | Цифровые входы повышенной |
Цифровые выходы (DO) | ||
18 | DO0, NC | Релейный выход DO0 |
19 | DO0, NO | Релейный выход DO0 |
20 | DO0, COM | Релейный выход DO0 |
21 | DO1+ | Транзисторный выход DO1 |
22 | DO1- | Транзисторный выход DO1 |
23 | DO2, NC | Релейный выход DO2 |
24 | DO2, NO | Релейный выход DO2 |
25 | DO2, COM | Релейный выход DO2 |
Аналоговые входы (AI) | ||
3 | AI0+ | Дифф. вход, возможность |
4 | AI0- | |
10 | AI1+ | Дифф. вход, возможность |
11 | AI1- | |
Аналоговые выходы (AO) | ||
12 | AO0+ | Потенциально связанный выход |
13 | AO0- | Опорный потенциал AO0/внутренняя |
26 | AO1+ | Свободно программируемый |
27 | AO1- | Опорный потенциал для аналоговых |
Интерфейс датчика температуры двигателя | ||
14 | T1 motor | Положительный вход для датчика |
15 | T2 motor | Отрицательный вход для датчика |
Питание | ||
9 | +24 V OUT | Выход питания |
28 | GND | Опорный потенциал |
1 | +10 V OUT | Выход питания |
2 | GND | Опорный потенциал |
31 | +24 V IN | Вход питания |
32 | GND IN | Опорный потенциал входа питания |
Функции
Basic positioner (EPos)
Overview
- Absolute and relative positioning
- Linear and rotary axis
- Motor encoder or direct measuring system
- 4 referencing modes
- 16 traversing blocks
- Direct setpoint input (MDI)
- Jog mode
- Backlash on reversal compensation
- Following error monitoring
- Cam signals
The positioning functions are only available in the CU250S‑2 Control Unit and are functionally identical to the positioning functionality of SINAMICS S110. Due to its flexibility and adaptability, the basic positioner can be used for a wide range of positioning tasks.
The functions are easy to handle both during commissioning and during operation. Furthermore, they are characterized by their comprehensive monitoring functions.
Many applications can be carried out without external position controllers.
The EPos basic positioner is available as an additional function module that can be activated, and is used for the absolute/relative positioning of linear and rotary axes (modulo) with both rotary and linear motor encoders (indirect measuring system).
User-friendly configuring and commissioning including control panel (operation using PC) and diagnostics with the STARTER commissioning tool V4.3 or higher.
In addition to extremely flexible positioning functions, EPos offers a high degree of user-friendliness and reliability thanks to integral monitoring and compensation functions.
Different operating modes and their functionality increase flexibility and plant productivity, for example, by means of "on-the-fly" and bumpless correction of the motion control.
Preconfigured PROFIdrive positioning frames are available which, when selected, automatically establish the internal "connection" to the basic positioner.
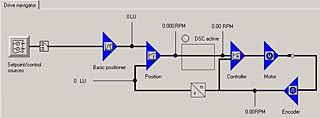
Functionality of the EPos basic positioner
Lower-level closed-loop position control with the following essential components
- Actual position value processing (including the lower-level measuring input evaluation and reference mark search)
- Position controller (including limits, adaptation and pre-control calculation)
- Position control cycle 8 ms (speed control cycle 2 ms)
- Monitoring functions (standstill, positioning and dynamic following error monitoring, cam signals)
Mechanical system
- Backlash on reversal compensation
Limitations
- Speed/acceleration/delay/jerk limitation
- Software limit switches (traversing range limitation by means of position setpoint evaluation)
- Stop cams (traversing range limitation using hardware limit switch evaluation)
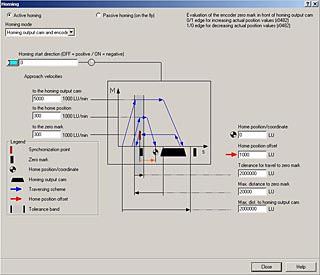
Referencing or adjustment
- Set reference point (for an axis at standstill that has reached its target position)
- Search for reference (separate mode including reversing cam functionality, automatic reversal of direction, referencing to "output cam and encoder zero mark" or only "encoder zero mark" or "external zero mark (BERO)")
- Flying referencing (seamless subordinate referencing is possible during "normal" traversing with the aid of measuring input evaluation, generally evaluation, e.g. of a proximity sensor). Subordinate function for the modes "jog", "direct setpoint input/MDI" and "traversing blocks")
- Absolute encoder alignment
Traversing blocks mode (16 traversing blocks)
- Positioning using traversing blocks that can be stored in the drive unit including block change enable conditions and specific tasks for an axis that was previously referenced
- Traversing block editor using STARTER
- A traversing block contains the following information:
- Job number and job (e.g. positioning, waiting, GOTO set jump, setting of binary outputs, travel to fixed stop)
- Motion parameters (target position, override speed for acceleration and deceleration)
- Mode (e.g.: hide block, continuation conditions such as "Continue_with_stop", "Continue_flying" and "Continue_externally using high-speed probe inputs")
- Job parameters (e.g. wait time, block step conditions)
Direct setpoint input (MDI) mode
- Positioning (absolute, relative) and setting-up (endless closed-loop position control) using direct setpoint inputs (e.g. via the PLC using process data)
- It is always possible to influence the motion parameters during traversing (on-the-fly setpoint acceptance) as well as for on-the-fly changes between the setup and positioning modes.
- The direct setpoint specification operating mode (MDI) can also be used in the relative positioning or setup mode if the axis is not referenced. This means that on-the-fly synchronization and re-referencing can be carried out using "flying referencing".
Jog mode
- Closed-loop position controlled traversing of the axis with "endless position controlled" or "jog incremental" modes (traverse through a "step width"), which can be toggled between
Интеграция

Схема соединений управляющего модуля серии CU230P-2

Схема соединений управляющего модуля серии CU240B-2

Схема соединений управляющего модуля серии CU240E-2

Коммуникационный интерфейс
RS485 USS/Modbus RTU/Bacnet MS/TP

Коммуникационный интерфейс
PROFIBUS DP

Коммуникационный интерфейс
CANopen
Технические данные
Управляющий модуль | серия CU230P-2 6SL3243-0BB30-1 . A2 | серия CU240B-2 6SL3244-0BB00-1 . A1 | серия CU240E-2 6SL3244-0BB1 . -1 . A1 |
|---|---|---|---|
Электрические данные | |||
Рабочее напряжение | DC 24 В через силовой модуль или через подключение внешнего источника питания DC 18 ... 30 В | ||
Потребляемый ток, макс. | 0.5 A | ||
Изоляция для защиты | PELV согласно EN 50178 | ||
Мощность потерь | <5.5 Вт | ||
Интерфейсы | |||
Цифровые входы – стандарт | 6 потенциально развязанных | 4 потенциально развязанных | 4 потенциально развязанных |
| Оптическая изоляция, свободный опорный потенциал (собственная группа потенциалов), макс. входной | ||
Цифровые входы – повышенной | – | – | 1 (использование 2 DI стандарт) |
Цифровые выходы | 2 переключающих реле | 1 транзистор | 1 транзистор
|
Аналоговые входы – стандарт | 2 дифф. входа | 1 дифф. вход | 2 дифф. входа |
| Возможность переключение через DIP-переключатель между напряжением и током: | ||
Аналоговые входы – расширенные | 1 потенциально связанный вход, | – | – |
Аналоговые выходы | 2 дифф. входа | 1 дифф. вход | 2 дифф. входа |
| 2 потенциально связанных выхода 1 потенциально связанный выход 2 потенциально связанных выхода | ||
PTC/KTY-интерфейс | 1 вход датчика температуры двигателя, | ||
Съемные пружинные штекеры для | – | ✓ | ✓ |
Встроенный интерфейс шины | |||
USS/Modbus RTU RS485 на клемме, | CU230P‑2 HVAC 6SL3243-0BB30-1HA2 | CU240B‑2 6SL3244-0BB00-1BA1 | CU240E‑2 6SL3244-0BB12-1BA1
CU240E‑2 F 6SL3244-0BB13-1BA1 |
BACnet MS/TP RS485 на клемме, | CU230P‑2 HVAC 6SL3243-0BB30-1HA2 | – | – |
PROFIBUS DP 9-пол. SUB-D-штекер, | CU230P‑2 DP 6SL3243-0BB30-1PA2 | CU240B‑2 DP 6SL3244-0BB00-1PA1 | CU240E‑2 DP 6SL3244-0BB12-1PA1
CU240E‑2 DP‑F 6SL3244-0BB13-1PA1 |
CANopen 9-пол. SUB-D-розетка, | CU230P‑2 HVAC 6SL3243-0BB30-1CA2 | – | – |
Инструментальные интерфейсы | |||
Карта памяти | 1 SINAMICS Micro Memory Card (MMC) или 1 SIMATIC Memory Card (SD-карта) | ||
Устройства управления |
| ||
PC-интерфейс | USB (подключение через комплект для соединения PC-преобразователь-2) | ||
Методы управления/регулирования | |||
V/f линейный/квадратичный/ | ✓ | ||
V/f с управлением по | ✓ | ||
V/f ECO линйеный/квадратичный | ✓ | ||
Векторное управление, без датчика | ✓ | ||
Векторное управление, с датчиком | – | ||
Управление по моменту, без датчика | ✓ | ||
Управление по моменту, с датчиком | – | ||
Программные функции | |||
Прикладной макрос | ✓ | ||
Установка заданного значения, | ✓ | ||
Постоянные частоты | 16, параметрируемые | ||
JOG | ✓ | ||
Цифровой потенциометр двигателя (MOP) | ✓ | ||
Сглаживание рампы | ✓ | ||
Расширенный задатчик интенсивности | ✓ | ||
Компенсация скольжения | ✓ | ||
Соединение сигналов по технологии BICO | ✓ | ||
Трассировка | ✓ | ||
Индикация энергосбережения | ✓ | ||
Переключаемые блоки данных приводов (DDS) | ✓ (4) | ||
Переключаемые командные блоки данных (CDS) | ✓ (4) | ||
Свободные функциональные блоки | ✓ | ||
Технологический регулятор | ✓ | ||
3 доп., свободных ПИД-регулятора | ✓ | – | – |
2-зонный регулятор | ✓ | – | – |
Перезапуск на ходу | ✓ | ||
Автоматический перезапуск | ✓ | ||
Функция энергосбережения (гибернации) с внутренним ПИД-регулятором | ✓ | – | – |
Функция энергосбережения | ✓ | – | – |
Контроль клинового ремня | ✓ |
Запрос коммерческого предложения× Сообщение отправлено× В ближайшее время сообщение будет обработано. Письмо с номером обращения отправлено на Ваш почтовый ящик. Спасибо за то, что выбрали Первый ZIP! Что-то пошло не так...× К сожалению, наша система расценила Ваше сообщение как спам. Если это произошло по ошибке, пожалуйста, обратитесь к нам по электронной почте. Приносим извинения за возможные неудобства.  Вы отправляете нам запрос  Если у нас есть прайс-лист, мы отправляем Вам ответ в течение дня. А если у нас нет прайс-листа по запрошенным товарам?     Если у нас нет прайс-листа, мы отправляем запрос производителю.  Ответ от производителя может занять до 5 дней и более. Ответ от производителя может занять до 5 дней и более.  Запрос производителю мы отправляем только для конечных потребителей.  Торгующим организациям коммерческие предложения предоставляются только по прайсовым позициям: Siemens Beckhoff Pepperl+Fuchs Phoenix Contact PILZ Turck Leuze Electronic Endress+Hauser Murr Elektronik Schmersal | |