Блоки управления CU240D Siemens

Обзор
Пример блока управления CU240D DP-F
Блок управления обеспечивает функции управления преобразователем по замкнутому циклу. Дополнительно к функциям управления блок управления также выполняет другие задачи, которые могут быть адаптированы к соответствующей задаче путем параметрирования. Блоки управления доступны в различных версиях:
- CU240D DP
- CU240D DP-F
Дизайн
Модуль управления имеет следующие подключения:
- Питание 24 В
- PROFIBUS интерфейс и DIP-переключатель для адресации PROFIBUS и согласующее сопротивление PROFIBUS
- 6 цифровых входов для 6 датчиков
- 2 цифровых выхода
- Интерфейс энкодера для обратной связи (HTL биполярный)
- Оптический интерфейс для подключения кабеля связи с компьютором по RS232
- Слот для карточки памяти MMC на обратной стороне
- Интерфейс PM IF на обратной стороне, для подключения к силовому модулю

Подключения для модуля управления CU240D DP-F
Функции
Блок управления (EPos)
Обзор
- Абсолютное и относительное позиционирование
- Линейные и круговые оси
- Энкодер двигателя или система измерения перемещения
- 4 разных режима
- 16 кадров перемещения
- Прямой ввод установки (MDI)
- Jogging
- Компенсация люфта
- Мониторинг ошибок
- Сигналы с камеры
Функции позиционирования доступны только в блоке управления CU250D‑2 и функционально идентичны SINAMICS S110. Благодаря своей гибкости и адаптивности, основной позиционер может быть использован для широкого круга задач позиционирования.
Функции просты в обращении и при вводе в эксплуатацию и в процессе эксплуатации. Кроме того,они характеризуются комплексными функциями мониторинга.
Многие программы может запускать без внешних контроллеров положения.
Простой позиционер EPos доступен в качестве дополнительного функционального модуля, который можно активировать, и используется для абсолютного / относительного позиционирования линейных и круговых осей (по модулю) с обеих поворотных и линейных датчиков двигателя (косвенная измерительная система)
Дружелюбная пользовательская настройка и ввод, в том числе панель управления (управление с помощью ПК) и диагностика с инструментов эксплуатации STARTER версии 4.3 и выше
В дополнение к чрезвычайно гибким функциям позиционирования, EPos предлагает высокую степень удобства и надежность благодаря интегральным функциям контроля и компенсации.
Различные режимы работы и их функциональность повышают гибкость и продуктивность оборудования, например, с помощью функции "на лету" и безударной коррекции управления движением.
Предварительно настроенный формат позиционирования PROFIdrive доступен, выбор которого автоматически установливает внутреннюю "связь" с базовым позиционером.
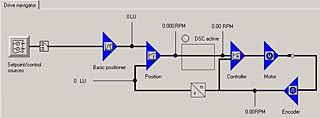
Функциональность базового позиционера EPos
Контроль положения нижнего уровня с замкнутым контуром со следующими основными компонентами
- Фактическое значение определения положения (в том числе по оценке измерительного входа низкого уровня и референтной метке поиска)
- Регулятор положения (в том числе ограничения, адаптации и расчет предварительно управления)
- Позиция цикла управления 8 мс (скорость цикла управления 2 мс)
- Функции контроля (состояния покоя, позиционирование и последующий динамичный мониторинг ошибок, пазогребневые сигналы)
Механическая система
- Компенсация люфта
Ограничения
- Скорость / ускорение / замедление / ограничение рывка
- Программные конечные выключатели (перемещения диапазона ограничения с помощью оценки заданного значения положения)
- Стоп-камеры (перемещения диапазона ограничения с помощью оценки аппаратного конечного выключателя)
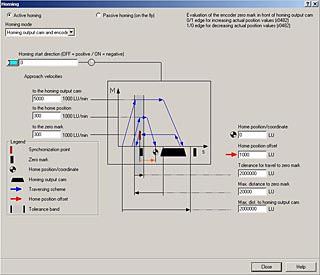
Реферирование или регулировка
- Ссылка застывания (с стационарной оси)
- Поиск справки (отдельный режим, в том числе реверсивная функциональность камеры, автоматическое изменение направления, ссылаясь на "output cam and encoder zero mark" или только "encoder zero mark" или "external zero mark (BERO)")
- Плавающие ссылки (бесшовные подчиненные ссылки возможны в "нормальном" обходе с помощью измерения оценки входа; например, подчиненная функция BERO для режимов "пробежка, "прямая установка входа / MDI" и "кадры перемещения" )
- Абсолютное выравивание с помощью датчика
Режим перемещения блоков (16 блоков)
- Позиционирование путем перемещения блоков, хранящихся в устройстве, в том числе продолжения использования и конкретных рабочих мест для размещенных осей
- Редактор перемещения блоков STARTER
- Блок перемещения содержит следующую информацию:
- Количество работы (например, позиционирование, ожидание, GOTO block jump, установка бинарных входов, жесткий упор)
- Параметры перемещения (конечное положение, переопределение скорости для ускорения и замедления)
- Режим (например, спрятать блок, продолжение условий, таких как "Continue_with_stop", "Continue_flying" and "Continue_externally using high-speed measuring inputs")
- Параметры работы (например, время ожидания, остановка блока)
Режим прямого указания заданного значения (MDI)
- Позиционирование (абсолютное, относительное) и установка (бесконечный контроль положения с обратной связью) используя прямые настройки входа (например, через PLC, используя данные процесса)
- Всегда есть возможность влиять на параметры движения во время обхода (на лету принятия установки), а также во время изменения между режимами настройки и позиционирования
- Режим "спецификация прямой уставки" (MDI) также может быть использован в позиционировании или настройке относительного режима, если ось не приводится. Это означает, что синхронизации "на лету" и повтор ссылок может быть осуществлено с использованием "летающей ссылки"
Режим Jog
- Положение в замкнутом контуре контролируется перемещением по оси с "бесконечным контролем положения" или режимом "пошаговой инкрементации» (пройти через "ширину шага"), который может переключаться
Интеграция
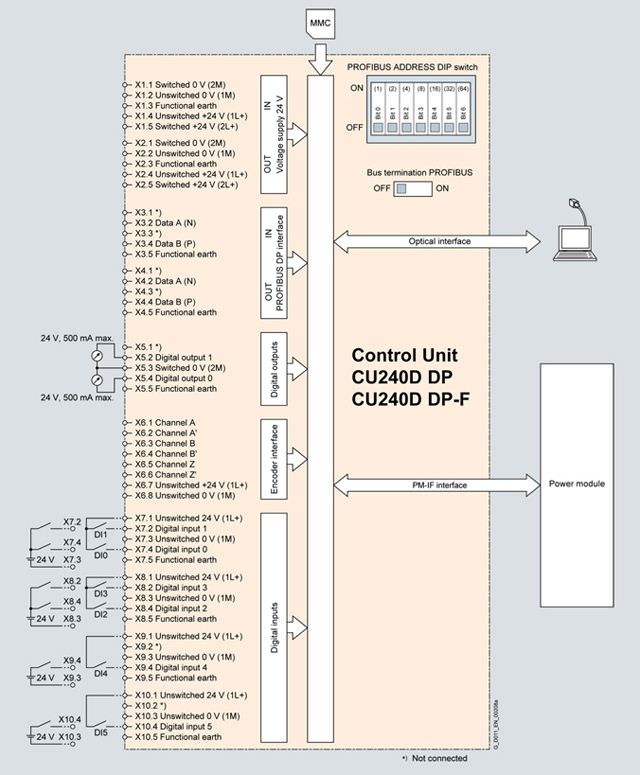
Схема подключения для блоков управления CU240D DP и CU240D DP‑F

Схема подключения для блоков управления CU240D PN и CU240D PN‑F
Технические данные
| Блок управления CU240D DP 6SL3544‑0FA20‑1PA0 | Блок управления CU240D DP-F |
|---|---|---|
Электрические данные | ||
Рабочее напряжение | Внешнее питание 24 В DC | Внешнее питание 24 В DC |
| ||
Цифровые входы – стандартные | 6 | 6 |
Цифровые входы – отказоустойчивые | 2 | 2 |
Интерфейс шины | PROFIBUS DP | PROFIBUS DP, PROFIsafe |
Интерфейсы датчиков | 1 | 1 |
Интерфейс PTC/KTY) | ✓ | ✓ |
Интерфейс тормозного реле | ✓ | ✓ |
Гнездо для платы памяти MMC | ✓ | ✓ |
RS232 интерфейс | ✓ | ✓ |
Функции безопасности | ||
Встроенные функции безопасности в соответствии с категорией 3 EN 954-1 или SIL2 IEC 61508 | – |
Функции безопасности "Безопасное ограничение скорости" и "Безопасный останов 1" сертифицированны для асинхронных двигателей без энкодеров, эти функции не допустимы в случае протягивающих нагрузок, как например редукторы лифтов и намотчики. |
Функции управления по разомкнутому и замкнутому циклу | ||
V/f линейное/квадратичное/параметрируемое | ✓ | ✓ |
V/f с управлением потока тока (FCC) | ✓ | ✓ |
Векторное управление, без датчика | ✓ | ✓ |
Векторное управление с датчиком | ✓ | ✓ |
Управление моментом, без датчика | ✓ | ✓ |
Управление моментом с датчиком | ✓ | ✓ |
Программные функции | ||
Фиксированные частоты | 16, программируемые | 16, программируемые |
Связь сигналов с технологией BICO | ✓ | ✓ |
Автоматический перезапуск после сбоев электропитания или неисправности | ✓ | ✓ |
Замедление позиционирования | ✓ | ✓ |
Компенсация пробуксовки | ✓ | ✓ |
Функциональные блоки (FFB), определяемые пользователем, для логических и арифметических операций | ✓ | ✓ |
Кинетическая буферизация | ✓ | ✓ |
3 выбираемых набора данных привода | ✓ | ✓ |
3 выбираемых набора данных привода(CDS) (ручной/автоматический) | ✓ | ✓ |
Подхват на ходу | ✓ | ✓ |
JOG (толчок) | ✓ | ✓ |
Технологический контроллер (PID) | ✓ | ✓ |
Тепловая защита двигателя | ✓ | ✓ |
Тепловая защита преобразователя частоты | ✓ | ✓ |
Setpoint specification | ✓ | ✓ |
Идентификация двигателя | ✓ | ✓ |
Управление удерживающим тормозом двигателя | ✓ | ✓ |
Механические данные | ||
Степень защиты | IP65 | IP65 |
Рабочая температура | -10 ... +55 °C | 0 ... 40 °C |
Температура хранения | -40 ... +70 °C | -40 ... +70 °C |
Относительная влажность | < 95% RH, без образования | < 95% RH, без образования |
Размеры |
|
|
| 150 мм | 150 мм |
| 210 мм | 210 мм |
| 40 мм | 40 мм |
Вес, приблизительно | 0.7 кг | 0.7 кг |




 Ответ от производителя может занять до 5 дней и более.
Ответ от производителя может занять до 5 дней и более.